Point Cloud Optimization
import multipers as mp
from multipers.data import noisy_annulus, three_annulus
import gudhi as gd
import numpy as np
import matplotlib.pyplot as plt
import torch
# t.autograd.set_detect_anomaly(True)
from multipers.plots import plot_signed_measures, plot_signed_measure
from tqdm import tqdm
torch.manual_seed(1)
np.random.seed(1)
Spatially localized optimization
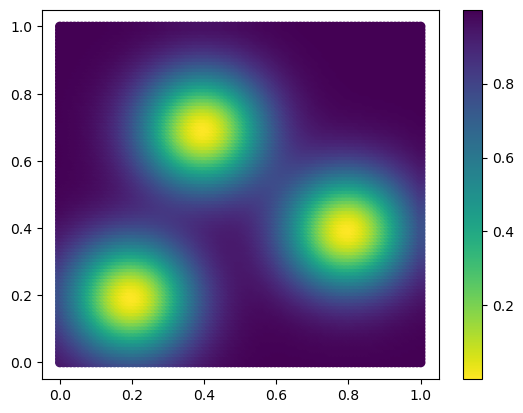
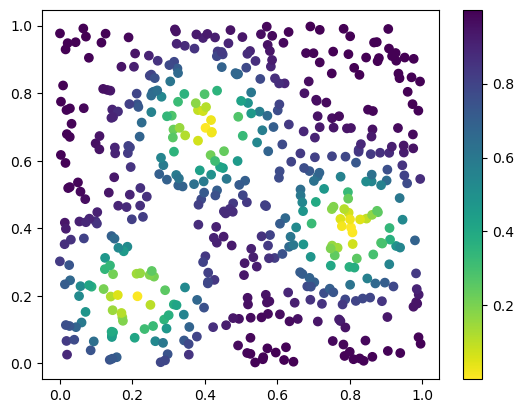
The goal of this notebook is to generate cycles on the modes of a fixed measure.
In this example, the measure is defined (in the cell below) as a sum of 3 gaussian measures.
## The density function of the measure
def custom_map(x, sigma=.17, threshold=None):
if x.ndim == 1:
x = x[None,:]
assert x.ndim ==2
basepoints = torch.tensor([[0.2,0.2], [0.8, 0.4], [0.4, 0.7]]).T
out = -(torch.exp( - (((x[:,:,None]- basepoints[None,:,:]) / sigma).square() ).sum(dim=1) )).sum(dim=-1)
return 1+out
x= np.linspace(0,1,100)
mesh = np.meshgrid(x,x)
coordinates = np.concatenate([stuff.flatten()[:,None] for stuff in mesh], axis=1)
coordinates = torch.from_numpy(coordinates)
plt.scatter(*coordinates.T,c=custom_map(coordinates), cmap="viridis_r")
plt.colorbar()
<matplotlib.colorbar.Colorbar at 0x32e39c590>
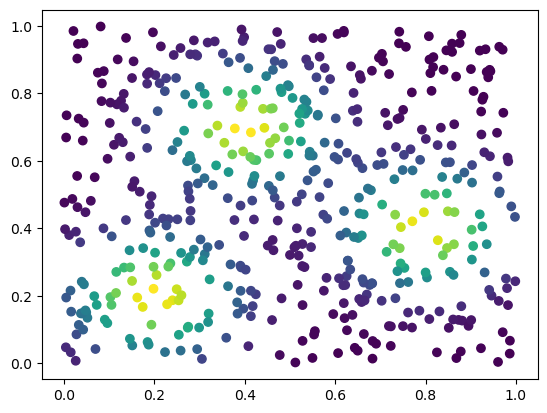
We start from a uniform point cloud, that we will optimize
x = np.random.uniform(size=(500,2))
x = torch.tensor(x, requires_grad=True)
plt.scatter(*x.detach().numpy().T, c=custom_map(x).detach().numpy(), cmap="viridis_r")
plt.colorbar()
<matplotlib.colorbar.Colorbar at 0x329356e90>
The usual filtration functions (e.g., RipsLowerstar, Cubical, DelaunayLowerstar) automatically detect the differentiability of the input, and propagates the gradient in that case.
Nothing changes !
x = np.random.uniform(size=(300,2))
x = torch.tensor(x, requires_grad=True)
from multipers.filtrations import RipsLowerstar, DelaunayLowerstar
# st = DelaunayLowerstar(points=x,function=custom_map(x), flagify=True)
st = RipsLowerstar(points=x,function=custom_map(x))
st.collapse_edges(-1) # litte preprocessing
st.expansion(2) # adding 2-dimensional simplices are necessary for H1
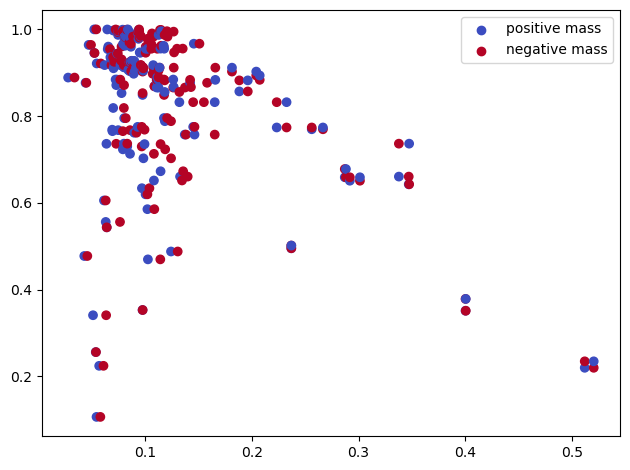
sm_diff, = mp.signed_measure(st, degree=1, plot=True)
print(sm_diff[0].requires_grad) # Should be true
/Users/dlapous/micromamba/envs/313/lib/python3.13/site-packages/gudhi/simplex_tree.py:122: UserWarning: Converting a tensor with requires_grad=True to a scalar may lead to unexpected behavior.
Consider using tensor.detach() first. (Triggered internally at /Users/runnerx/miniforge3/conda-bld/libtorch_1769768019679/work/torch/csrc/autograd/generated/python_variable_methods.cpp:837.)
ret._insert_matrix(filtrations, max_filtration)
True
For this example we use the following loss. Given a signed measure \(\mu\), define
where \(x := (r,d)\in \mathbb R^2\) (\(r\) for radius, and \(d\) for codensity value of the original measure) $\(\varphi(x) = \varphi(r,d) = r\times(\mathrm{threshold}-d)\)$
This can be interpreted as follows :
we maximise the radius of the negative point (maximizing the radius of cycles)
we minimize the radius of positive points (the edges of the connected points creating the cycles). This create pretty cycles
we care more about cycles that are close to the mode (the
threshold-dpart). The threshold is meant to prevent the cycles that are not close enough the the cycles to progressively stop to create loops.
threshold = .65
def softplus(x):
return torch.log(1+torch.exp(x))
# @torch.compile(dynamic=True)
def loss_function(x,sm):
pts,weights = sm
radius,density = pts.T
density = density
phi = lambda x,d : (
x
* (threshold-d)
).sum()
loss = phi(radius[weights>0], density[weights>0]) - phi(radius[weights<0], density[weights<0])
return loss
loss_function(x,sm_diff) #test that it work. It should make no error + have a gradient
tensor(0.2417, dtype=torch.float64, grad_fn=<SubBackward0>)
As Delaunay complexes are faster to use in low-dimensional Euclidean space, we switch from Rips to Delaunay, and optimize this loss_function.
Another optimization would be to copy the simplextree into a slicer, on which it’s possible to compute a minimal presentation. Computing the Hilbert function is a quite fast computation, so this will not lead to a significative improvement, but consider this optimization when computing harder invariants !
from multipers.filtrations import DelaunayLowerstar
xinit = np.random.uniform(size=(500,2)) # initial dataset
x = torch.tensor(xinit, requires_grad=True)
adam = torch.optim.Adam([x], lr=0.01) #optimizer
losses = []
plt.scatter(*x.detach().numpy().T, c=custom_map(x, threshold=np.inf).detach().numpy(), cmap="viridis_r")
plt.show()
for i in range(101): # gradient steps
# Little caveat of Delaunay, they are hard to differentiate.
# We hence weaken the delaunay complex into a flag complex, which is easier to differentiate,
# with the `flagify=True` flag.
st = DelaunayLowerstar(points=x, function=custom_map(x), flagify=True)
sm_diff, = mp.signed_measure(st, degree=1)
# Rips version
# st = RipsLowerstar(points=x,function=custom_map(x))
# st.collapse_edges(-1)
# st.expansion(2)
# sm_diff, = mp.signed_measure(st, degree=1)
adam.zero_grad()
loss = loss_function(x,sm_diff)
loss.backward()
adam.step()
losses.append([loss.detach().numpy()])
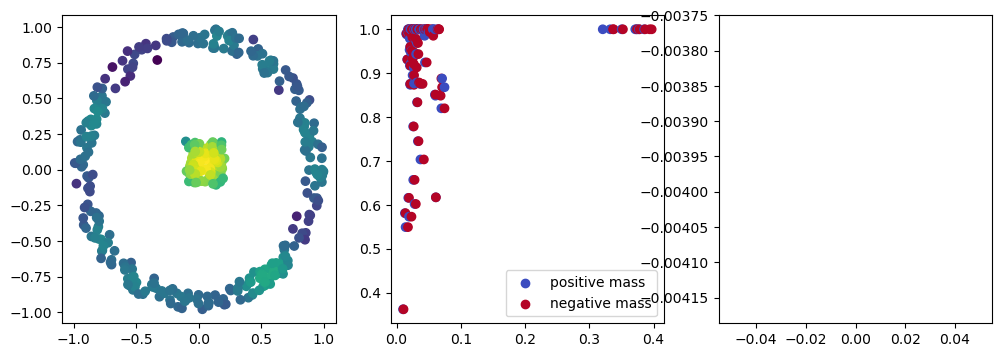
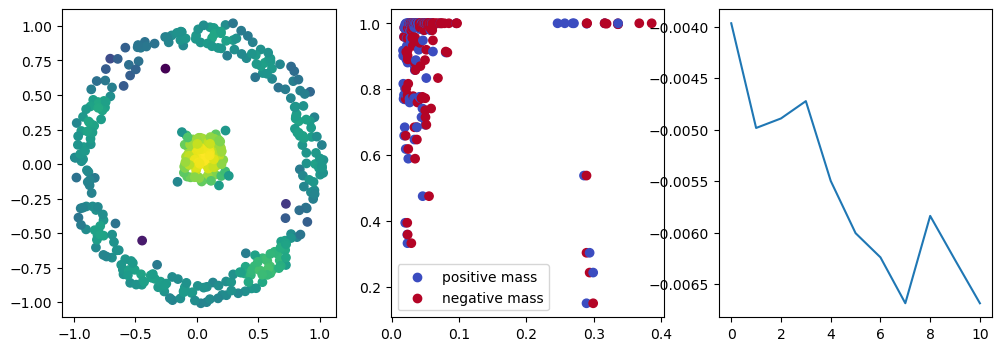
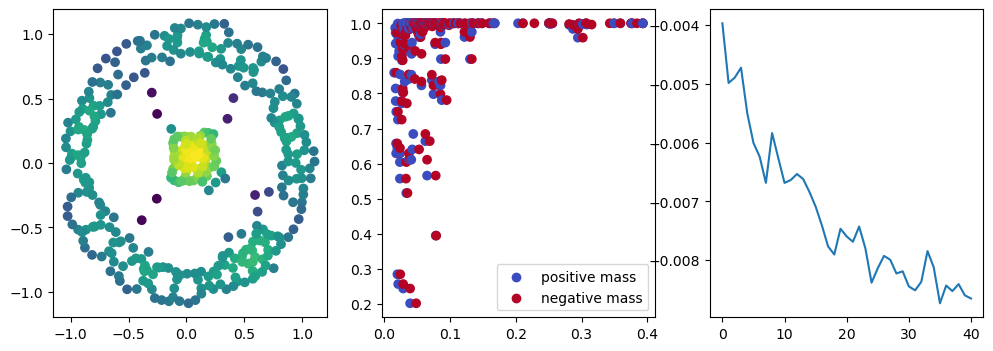
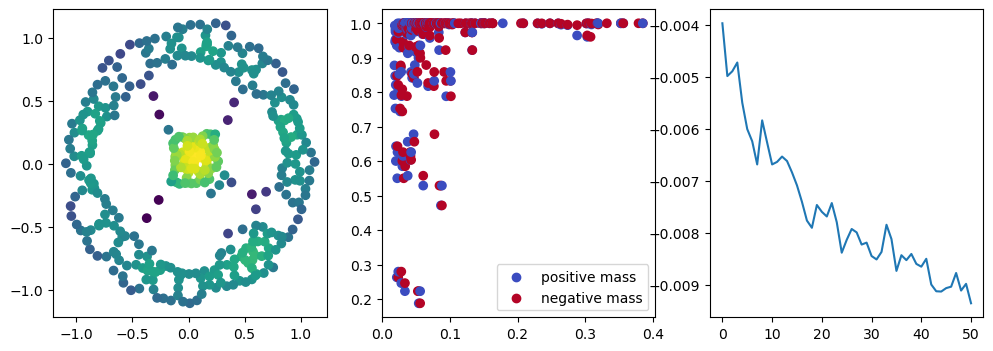
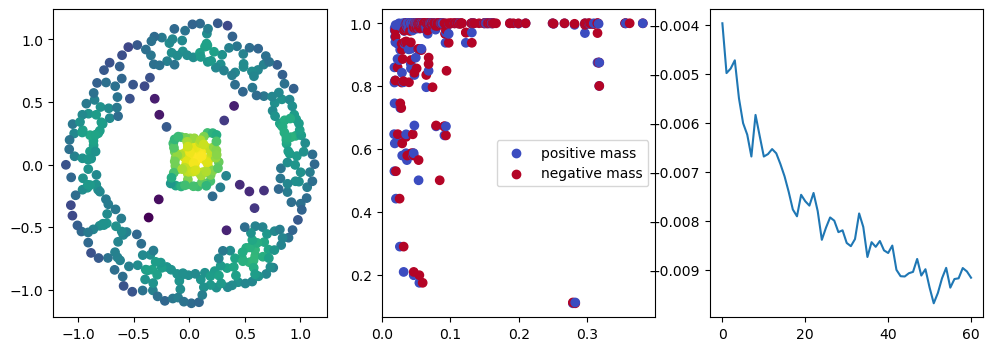
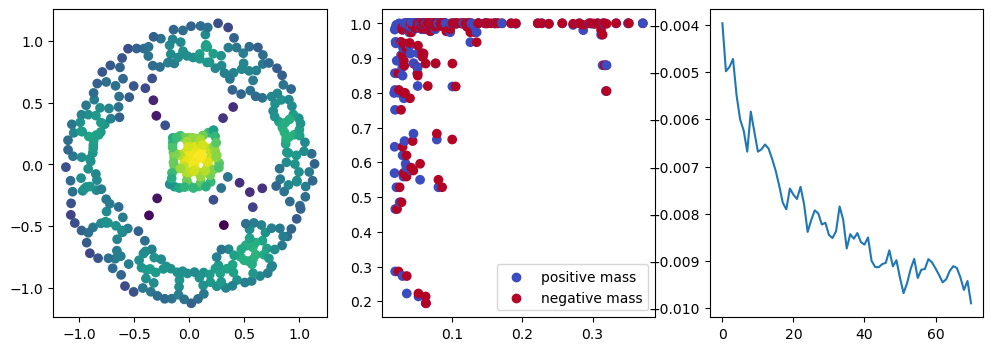
with torch.no_grad():
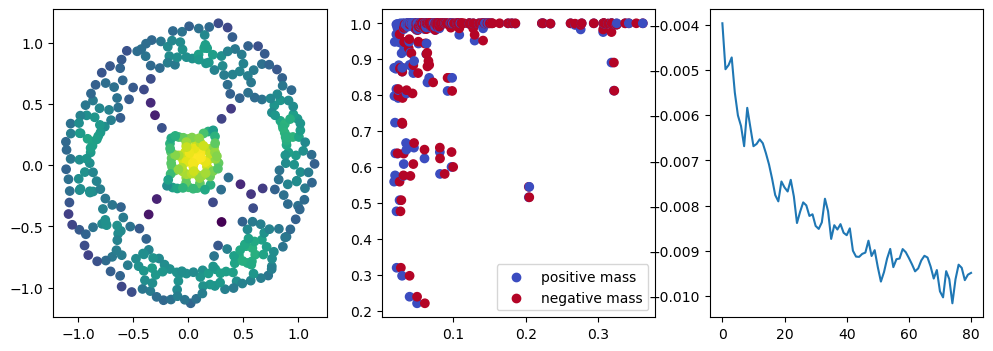
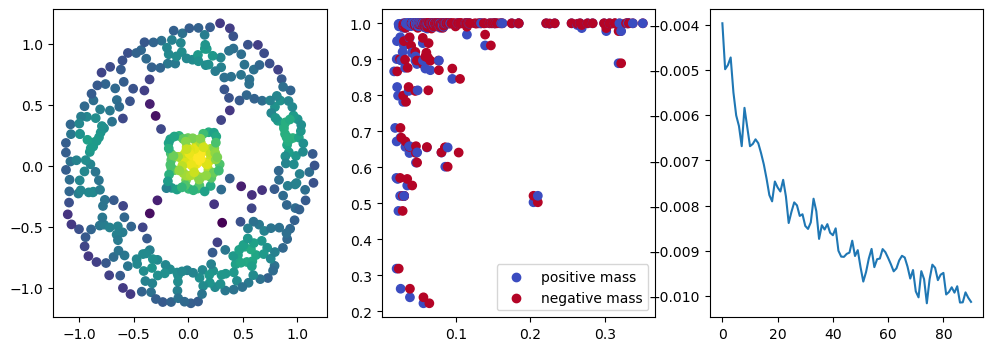
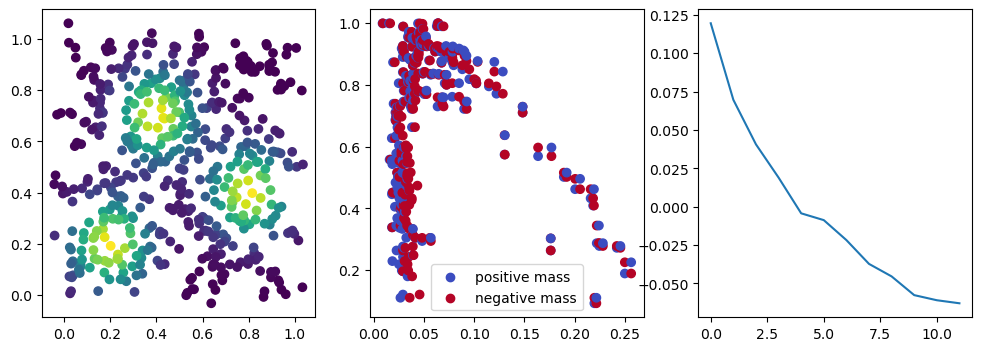
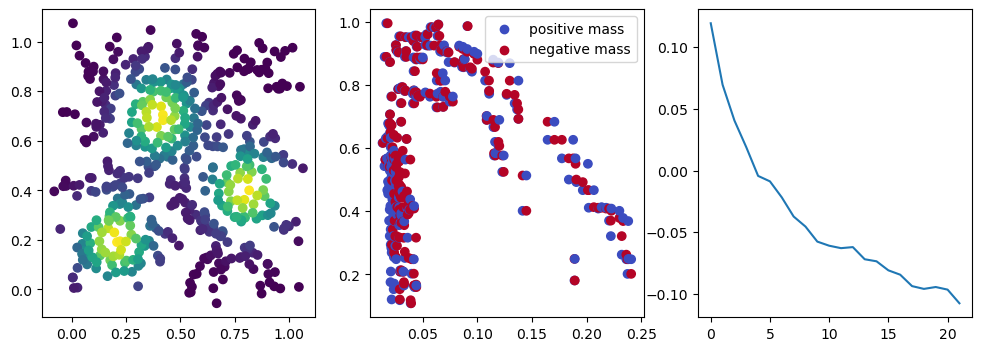
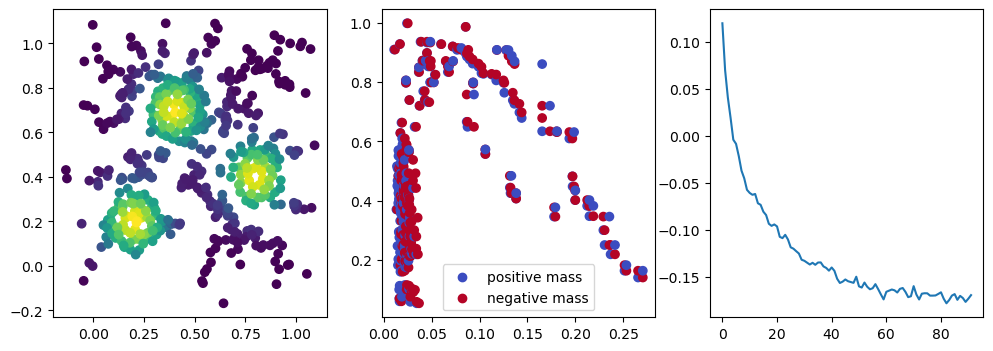
if i %10 == 1: #plot part
base=4
ncols=3
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=ncols, figsize=(ncols*base, base))
ax1.scatter(*x.detach().numpy().T, c=custom_map(x, threshold=np.inf).detach().numpy(), cmap="viridis_r", )
plot_signed_measure(sm_diff, ax=ax2)
ax3.plot(losses, label="loss")
plt.show()
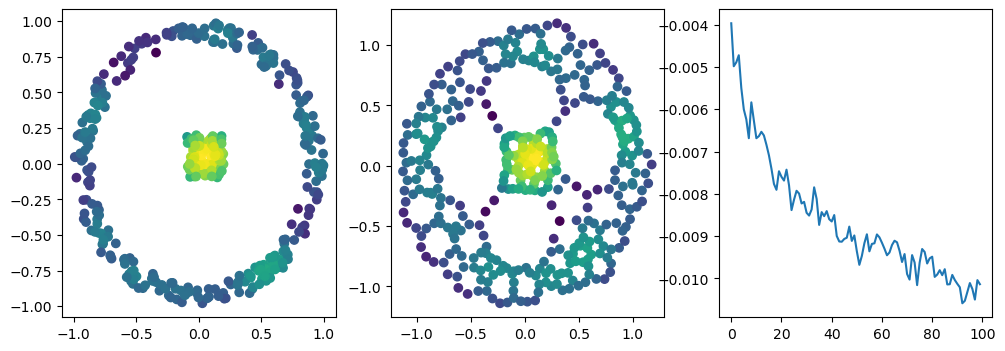
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=ncols, figsize=(ncols*base, base))
ax1.scatter(*xinit.T, c=custom_map(torch.tensor(xinit)).detach().numpy(),cmap="viridis_r")
ax2.scatter(*x.detach().numpy().T, c=custom_map(x).detach().numpy(),cmap="viridis_r")
ax3.plot(losses)
plt.show()
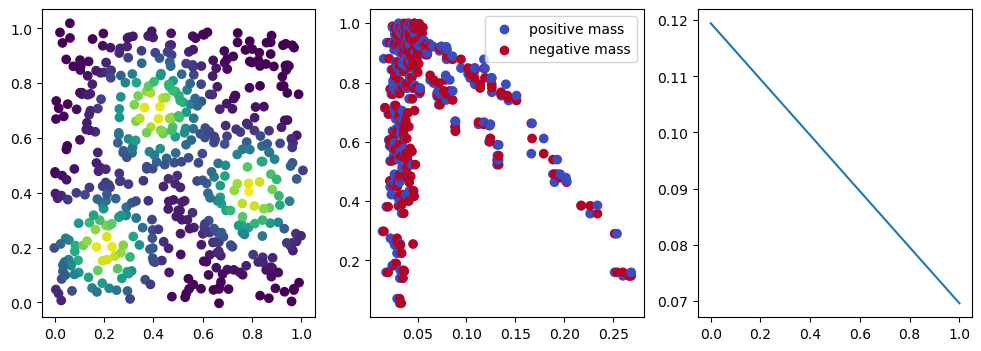
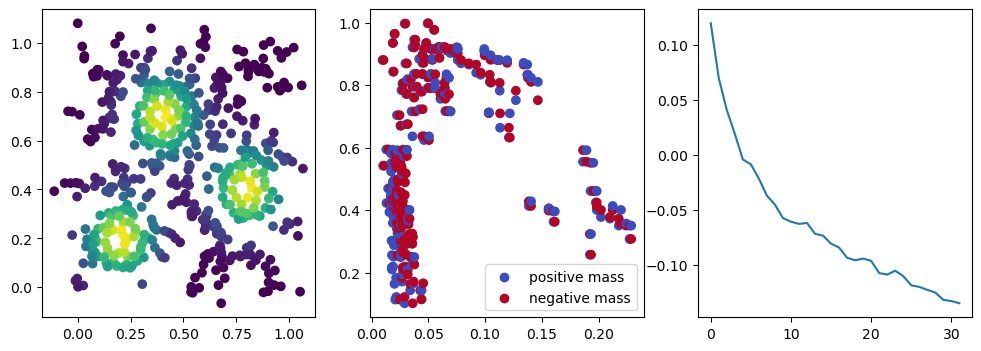
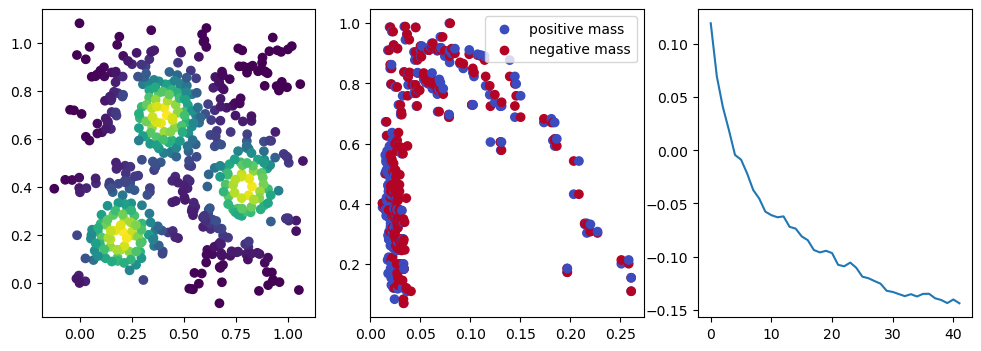
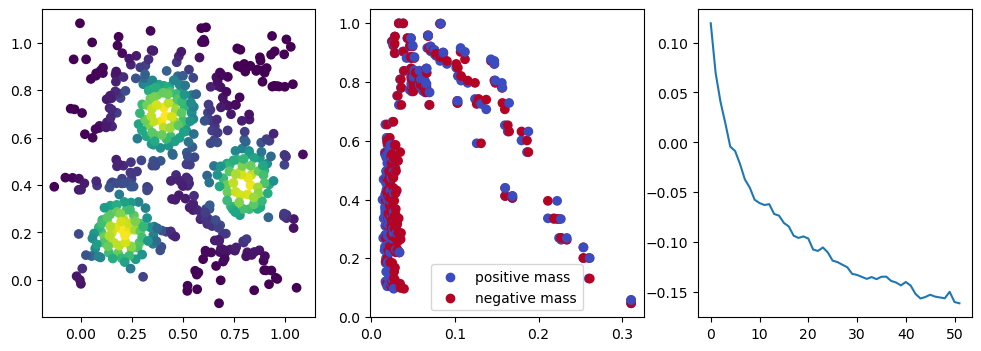
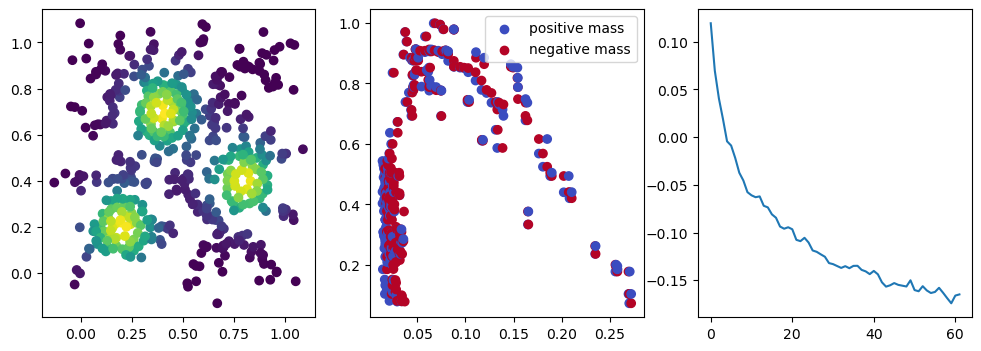
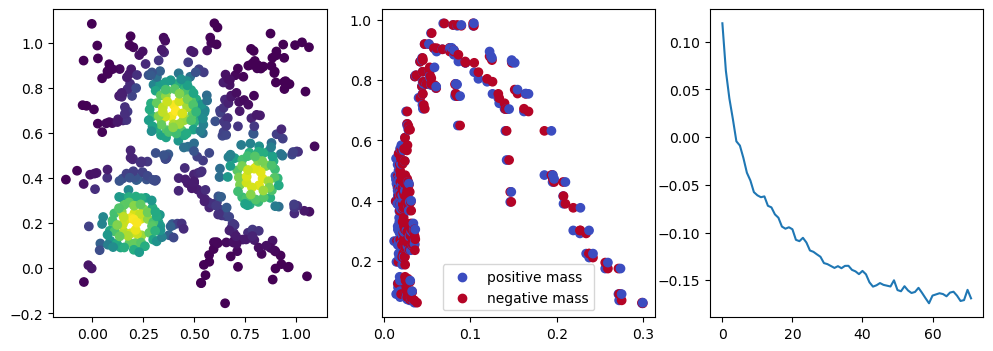
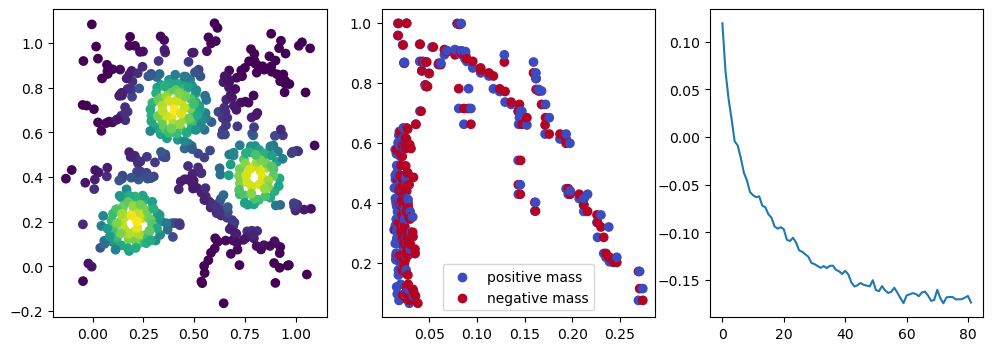
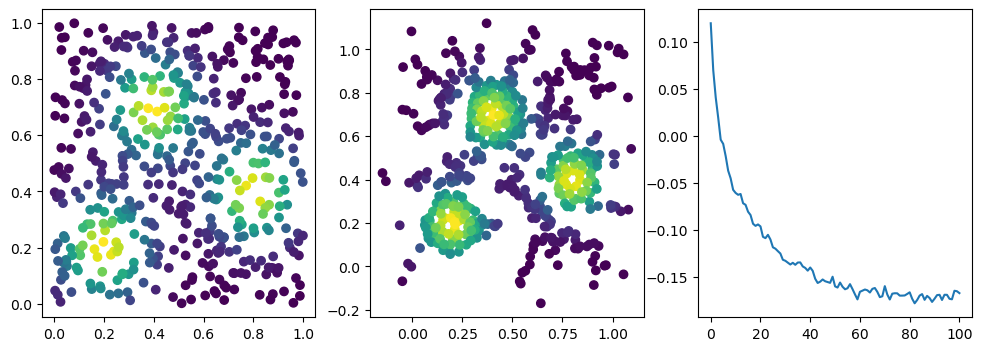
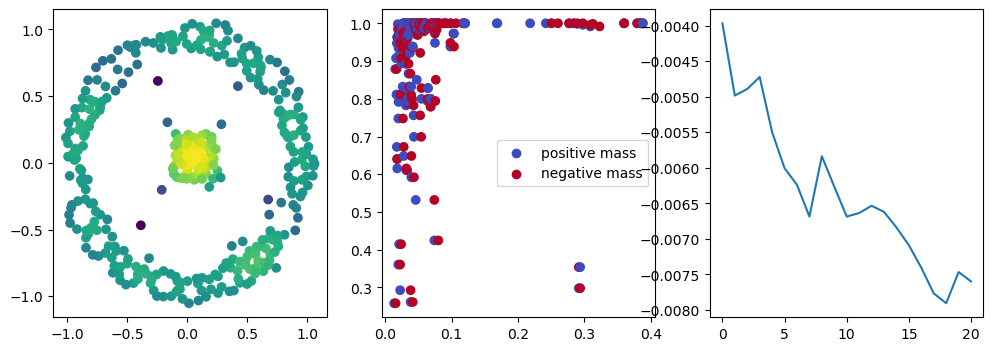
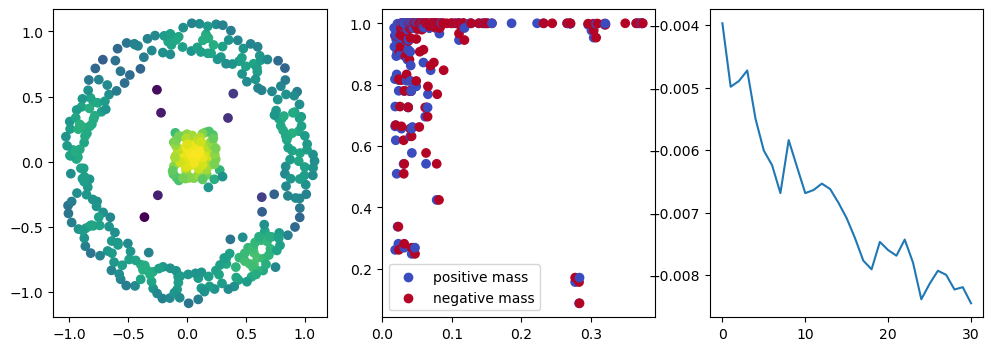
We now observe an onion-like structure around the poles of the background measure.
How to interpret this ? The density constraints (in the loss) and the radius constraints are fighting against each other, therefore, each cycle has to balance itself to a local optimal, which leads to these onion layers.
Density preserving optimization
Example taken from the paper Differentiability and Optimization of Multiparameter Persistent Homology,
and is an extension of the point cloud experiement of the optimization Gudhi notebook.
One can check from the Gudhi’s notebook that a compacity regularization term is necessary in the one parameter persistence setting; this issue will not happen when optimizing a Rips-Density bi-filtration, as we can enforce cycles to naturally balance between scale and density, and hence not diverge.
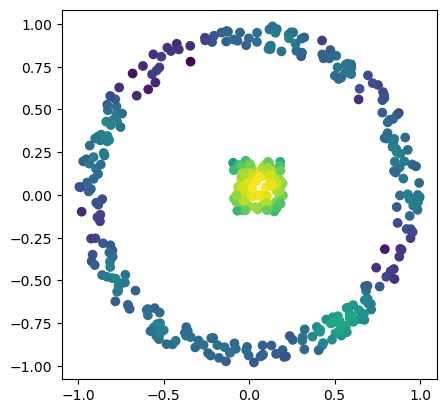
from multipers.filtrations.density import KDE
X = np.block([
[np.random.uniform(low=-0.1,high=.2,size=(100,2))],
[mp.data.noisy_annulus(300,0, 0.85,1)]
])
bandwidth = .1
custom_map2 = lambda X : -KDE(bandwidth=bandwidth, return_log=True).fit(X).score_samples(X)
codensity = custom_map2(X)
plt.scatter(*X.T, c=-codensity)
plt.gca().set_aspect(1)
[KeOps] Warning : CUDA libraries not found or could not be loaded; Switching to CPU only.
def norm_loss(sm_diff,norm=1.):
pts,weights = sm_diff
loss = (torch.norm(pts[weights>0], p=norm, dim=1)).sum() - (torch.norm(pts[weights<0], p=norm, dim=1)).sum()
return loss / pts.shape[0]
x = torch.from_numpy(X).clone().requires_grad_(True)
opt = torch.optim.Adam([x], lr=.01)
losses = []
for i in range(100):
opt.zero_grad()
st = DelaunayLowerstar(points=x, function=custom_map(x), flagify=True)
sm_diff, = mp.signed_measure(st, degree=1)
loss = norm_loss(sm_diff)
loss.backward()
losses.append(loss)
opt.step()
if i % 10 == 0:
with torch.no_grad():
base=4
ncols=3
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=ncols, figsize=(ncols*base, base))
ax1.scatter(*x.detach().numpy().T, c=custom_map2(x).detach().numpy(), cmap="viridis_r", )
plot_signed_measure(sm_diff, ax=ax2)
ax3.plot(losses, label="loss")
plt.show()
with torch.no_grad():
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=ncols, figsize=(ncols*base, base))
ax1.scatter(*X.T, c=custom_map2(torch.tensor(X)).detach().numpy(),cmap="viridis_r")
ax2.scatter(*x.detach().numpy().T, c=custom_map2(x).detach().numpy(),cmap="viridis_r")
ax3.plot(losses)
plt.show()